航空电子系统
“鹞”家族的每一系列都具有当时一流的航空电子系统。早期“鹞”系列航电系统的核心是导航-攻击系统,“鹞”II系列和“海鹞”FA.2的航电系统则以1553B数据总线为基础(GR.5/5A的数据总线不是1553B标准,但与之兼容),实现了余度化和综合化。限于篇幅,这里仅对其光电探测装置、雷达和座舱显示器进行简单介绍。
光电探测装置
早期“鹞”系列和“鹞”II系列多是攻击/侦察型,使用的光电探测装置主要有106型激光测距与目标标定装置(LRMTS)、ASB-19(V)角速率轰炸系统(ARBS)、前视红外(FLIR)装置、光电吊舱等。
106型LRMTS装备在英国的早期“鹞”系列上,是费伦蒂公司(今英宇航系统公司)产品,功能是使驾驶员识别由激光指示的地面目标,并将相应的引导信息显示在平显上。激光接收器的透镜安装在近似圆柱形的密闭装置内,通过在调定的俯角上进行方位扫描发现被激光束标定的目标,然后使激光接收器锁定在该目标上,并向驾驶员提供操纵命令以保证尽快地准确识别目标。106型LRMTS重约21千克,工作波长1.06微米,俯仰角-25°~+20°,方位角+/-18°,作用距离在10千米以内,精度约3.5米,平均故障间隔时间大于1000小时。
Harrier GR.3 长长的机鼻内安装了 Type 106 LRMTS

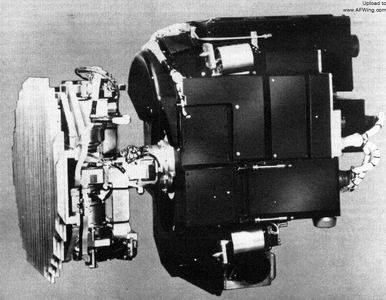
美国海军陆战队的AV-8A和除了AV-8B+的“鹞”II系列都装有由休斯飞机公司(今雷锡恩公司)研制的ASB-19(V) ARBS,它包括激光/电视双模式跟踪器、IBM的CP-1276武器投放计算机和C-10122控制单元,总体积0.057立方米,重63~68千克。激光跟踪器和电视跟踪器的共用光学系统(这样在切换工作模式时就不会丢失目标)安装在机头锥体正中间,跟踪方位角范围-37°~+37°,俯仰角范围-70°~+10°,旋转侧滚角范围-450°~+450°,两种模式都可以采用自动或手动跟踪控制。当工作在激光跟踪模式时,跟踪器自动跟踪地面、友机等外部照射源照射的目标,经过武器投放计算机计算后在平显上提供驾驶信息;工作在电视跟踪模式时,放大7倍的跟踪图像显示在电视显示器上,驾驶员标定后就可以转入自动跟踪。武器投放计算机的功能是接收来自双模跟踪器的信息,控制跟踪器在跟踪时的位置和转动速度、进行武器的弹道和火控计算并给武器系统发出自动发射或自动投放信号。得到投放时间、连续计算的弹着点等武器投放参数所需要的输入数据除了跟踪器锁定目标后飞机对目标的视线角和角速度外,还有来自大气数据计算机的真实空速和高度数据。武器投放计算机处理后得到的目标位置、武器投放和方位角驾驶信息通过平显提供给驾驶员。控制单元用于提供驾驶员和武器投放计算机的接口,提供跟踪方式控制、输入显示、目标信息、导航和维修信息等。ASB-19(V)使“鹞”攻击型能在一次通过中的精确攻击目标,也能在平显上给出返回目标的导航信息,以便驾驶员返回存储的预定目标再次进行攻击(若驾驶员指定了1个新目标,则原来存储的目标位置被消除)。ASB-19(V)的电视跟踪器还能为飞机提供有限的昼间空空作战能力,因为放大7倍的电视图像对空中目标的识别和跟踪特别有用。该系统的工作条件是:高度0~13716米,速度(指示空速)463~1019千米/小时,法向加速度-1~+7g,可采取水平、俯冲拉起、俯冲侧滑等多种工作方式。系统平均故障间隔指标250~300小时,下限值150小时,总工作寿命10000小时。
AV-8B 机鼻的 ASB-19(V)ARBS

“鹞”GR.7、AV-8B夜攻型和AV-8B+在机头上方鼓包内还装有英国通用电气公司(GEC)的FLIR。该FLIR可能基于英宇航系统的MIRLS-1000“小型红外行扫描”装置,MIRLS-1000本来是为需要热成像传感器的无人机开发的,所以体积很小,重量也只有5.4千克。该装置能提供前方180°的视场,能将图像通过实时视频输出装置显示到电视显示器上,也能通过窄带数据链将图像发送到地面站。前视红外夜视系统也装备美军AV-8B攻击型,它的光学部分通过机头前端的小型泡罩实现前视,能够提供前方经过优化的高分辨率图像,并能通过平显向驾驶员自动提示潜在的目标,使飞机能够在夜间及恶劣的气候条件下执行任务,大大增加使用率。
Harrier GR.7 机鼻上方的 MIRLS-1000

美国AV-8B夜攻型和AV-8B+使用的光电吊舱主要是“莱特宁”II(Litening II)及其改型。“莱特宁”II激光目标标定及导航吊舱是诺斯罗普·格鲁门与在以色列拉菲尔的“莱特宁”基础上研制的,具有一个256×256元的锑化铟中波红外(工作波长3~5微米)凝视阵列、两个具有宽、窄视场的电耦合器件(CCD)电视摄像机(分辨率768×494)、一个激光测距仪和一个能够在超过12千米高空使用的激光照射跟踪器、一个与夜视镜(NVG)兼容的激光标示器和一个惯性测量装置,美海军陆战队的型号还加装了一个用于毁伤评估的视频记录装置。从2001年8月起美军又开始试验“莱特宁”ER,美海军陆战队随后订购的“莱特宁”II也采用了这种标准。“莱特宁”ER的主要改进有:FLIR改用640×512元中波凝视阵列,大幅度提高了图像分辨率,并使识别和跟踪距离提高30%;CCD电视摄像机和FLIR的图像可以融合;激光器改用成熟的二极管泵浦型,有1.06微米和1.57微米两种人眼安全波长工作模式,可分别用于作战和训练;新的激光器提高了发射能量、减小了光束发散,具有更远的作用距离和精度。目前诺斯罗普·格鲁门还在研究将“莱特宁”II或ER的雷达电子战系统吊舱改型,吊舱内部将装备用于射频跟踪和定位的接收机、有源干扰机和AAQ-24“复仇女神”定向红外对抗系统。“莱特宁”II吊舱全重约200千克。
挂载 Litening II 的 AV-8B+

皇家空军“鹞”GR.7(以及未升级前的GR.5)主要使用英宇航系统的“天尔德”(TIALD)热成像/机载激光标定吊舱。该吊舱的热成像阵列、电视摄像机和激光标定装置使用同一个窗口,这种设计使它在同类吊舱中直径最小并易于瞄准。目前“鹞”GR.7使用的是500系列(最初使用400系列),它的主要特点是:用英宇航系统的384×288中波凝视阵列替代了原来的长波(8~12微米)阵列(红外摄像机仍由南非肯特龙生产),使目标探测和识别距离可望提高30%~40%;增加了诺斯罗普·格鲁门的LN-200惯性测量单元(IMU),使吊舱能快速得到位置信息并可将目标数据快速转交给其它探测装置;以自动瞄准线对准功能取代了原来的手动对准,可自动瞄准载机导航-攻击系统中预定的目标。
TIALD 吊舱

雷达
“鹞”家族中只有用于制空作战的“海鹞”FRS.1、FA.2,AV-8B+三种型号装有雷达,雷达型号分别是“蓝狐”(Blue Fox)、“蓝雌狐”(Blue Vixen)和APG-65。
“蓝狐”由费伦蒂公司(今英宇航系统的一部分)研制,是工作在I波段的高性能单脉冲雷达。它由9个“外场可更换组件”(LRU)组成,重约86千克,总方位扫描角110°,最大峰值功率90千瓦。该雷达采用直径550毫米的平板缝阵天线获得了较大的探测距离和低副瓣,并采用频率捷变技术对抗电子干扰。雷达远距离扫描结果可用扇形PPI显示(以本机为中心,等距点为圆弧线的极坐标显示方式),也可采用B型显示(角方位-距离的坐标显示方式)。“蓝狐”的平均故障间隔时间为120小时,可靠性在同代同级雷达中相当优秀。
“蓝雌狐”雷达由费伦蒂研制,是一种工作在I波段的轻型脉冲多普勒雷达,由多个LRU组成,重量约145千克。“蓝雌狐”具有高、中、低脉冲重复频率,并可根据地杂波状况和目标群密度自动选择脉冲重复频率进行探测优化(如采用低低脉冲重复频率用于下视模式以提供精确的距离和全向速度信息,采用高脉冲重复频率在高杂波环境下提供对高速逼近目标的下视探测),该雷达在对空状态下具有“边扫描边跟踪”(TWS)和“单目标跟踪”(STT)模式,据称是世界上第一种在设计时就考虑对AIM-120具有完全兼容性的机载雷达;在对海状态下能与“海鹰”空舰导弹配合。1993~1994年间“海鹞”FA.2使用该雷达对AIM-120A进行了一系列火力测试,有报道称测试证明该雷达能在为4枚AIM-120提供指令修正惯性导引的同时保持对目标的跟踪(表明该雷达的多目标攻击能力很容易得到进一步提高)。1998年11月英宇航系统根据军方合同又开始将该雷达与“联合战术信息分发系统”(JTIDS)进行综合(FA.2使用的JTIDS终端名称使AN/URC-138(V)),全部工作将在2004年完成,届时“蓝雌狐”雷达将能使用来自JTIDS的目标数据。
蓝狐雷达
AV-8B+使用的APG-65是从换装APG-73雷达的F/A-18C/D上拆下来的,该雷达是一种现代化的脉冲多普勒雷达,由休斯飞机从1976年开始研制,1982年服役。它带有直径690毫米的机械扫描缝隙阵列天线,工作在8~12G赫兹(I/J波段),具有高、中、低脉冲重复频率和频率捷变能力,峰值功率5~6千瓦,对空最大作用距离120千米,在TWS状态下探测距离74千米,能同时跟踪10个目标(显示8个)并使用AIM-120导弹进行多目标攻击,在STT模式下能为AIM-7导弹提供照射。该雷达对地功能也非常强大,除具有地形回避和地形跟踪能力外,在多普勒波束锐化(DBS)模式下具有19:1的锐化比(比值越大,分辨率越高),若进一步采用聚焦多普勒锐化(地图扩展)可以进一步提高到67∶1。此外还有更先进的合成孔径雷达(SAR)和地面移动目标指示(GMTI)模式,能分辨出地面停止或低速移动的车辆。由于采用宽频带、脉冲压缩和先进算法实现了高分辨率,该雷达在空对空状态下具有“袭击判断”模式,它基于DBS,但信号和数据处理方式不同,最大作用距离为55千米,能在远距离上分辨密集编队中的单个目标。由于AV-8B+已进行JTIDS升级,所以估计该雷达也能使用JTIDS的数据。
APG-65由低旁瓣天线、可编程行波管发射机、采用脉冲压缩技术的接收机/激励器、可编程信号处理机和数据处理机5个LRU组成,总重量154千克(加上机架小于200千克),体积小于0.13立方米(不包括天线),除发射机采用液冷外其余组件都采用气冷。可编程信号处理机(PSP)是1台运算速度720万次/秒的AYK-14计算机,采用了超高速集成电路技术(VHSIC),包括5000多块线宽1.25微米的集成电路板。软件采用汇编语言编写,能通过软件改进已有工作模式或增加新的工作模式。数据处理机采用了256K、16位字长的固态存储器(首次在战斗机机载雷达中使用),其存储的指令被读出口存入16K的固态存储器,使雷达能够连续保持目标轨迹。APG-65雷达设置有完整的自检测系统,故障检测率98%,整机平均故障间隔时间106小时,其中天线和发射机指标值350小时,处理机150小时,平均故障修复时间12分钟,可靠性在当时具有领先水平。
AV-8B+ 安装的 APG-65

座舱显示器
所有的“鹞”都装有平视显示器。早期“鹞”系列的平显是史密斯工业的4-20型(包括4-22、4-23)或4-40型(用于美国和西班牙的早期“鹞”,美国编号AVQ-30(V))。它们基本都实现了全数字化和模块化(4-40增加的武器瞄准计算机是数模混合式的),并能作为主飞行仪表使用;“海鹞”FRS.1、FA.2的平显是史密斯工业的5-60系列及其改进,同样可作为主飞行仪表使用;AV-8B基本型和“鹞”GR.5采用史密斯工业的6-50平显武器瞄准系统,能显示ASB-19(V)等光电探测设备获得的视频信息;AV-8B夜攻型和GR.7采用了能显示前视红外图像的新型广角平显(视场20°×16°)。早期“鹞”系列中的作战型在仪表板中央都装有英宇航系统的圆形投影地图显示器,它能存储并显示2200×1850千米范围内的地图,存储7个预定攻击的目标坐标,并可在飞行中调整和修改其中2个;“海鹞”FRS.1右侧仪表板上方有一个雷达显示器;“海鹞”FA.2和AV-8B+左右侧仪表板上方各有一个矩形下视显示器,FA.2的分别用于多功能显示和雷达显示,AV-8B+则恰好相反;“鹞”GR.5/7的左、右侧仪表板上方各布置有一个矩形下视显示器,其中GR.5左、右侧分别是显示ARBS的电视图像和导航、武器管理等信息的多功能显示器和活动地图显示器,而GR.7刚好相反,并且它右侧的多功能显示器还可显示前视红外和光电吊舱图像;AV-8B基本型只在仪表板左侧上方有一个矩形的下视显示器(凯瑟尔公司的IP-1318),AV-8B夜攻型在仪表板中央有圆形的彩色活动地图显示器,右侧上方有矩形的彩色下视显示器(作用与GR.7的多功能显示器相同)。“鹞”家族中,“鹞”II系列和“海鹞”FA.2都能在作战过程中保持“手握双杆”(HOTAS)和平视飞行。
AV-8B+ 的座舱布置考虑了夜视要求

